Robot Gallery
Some highlights from my robotics research work.

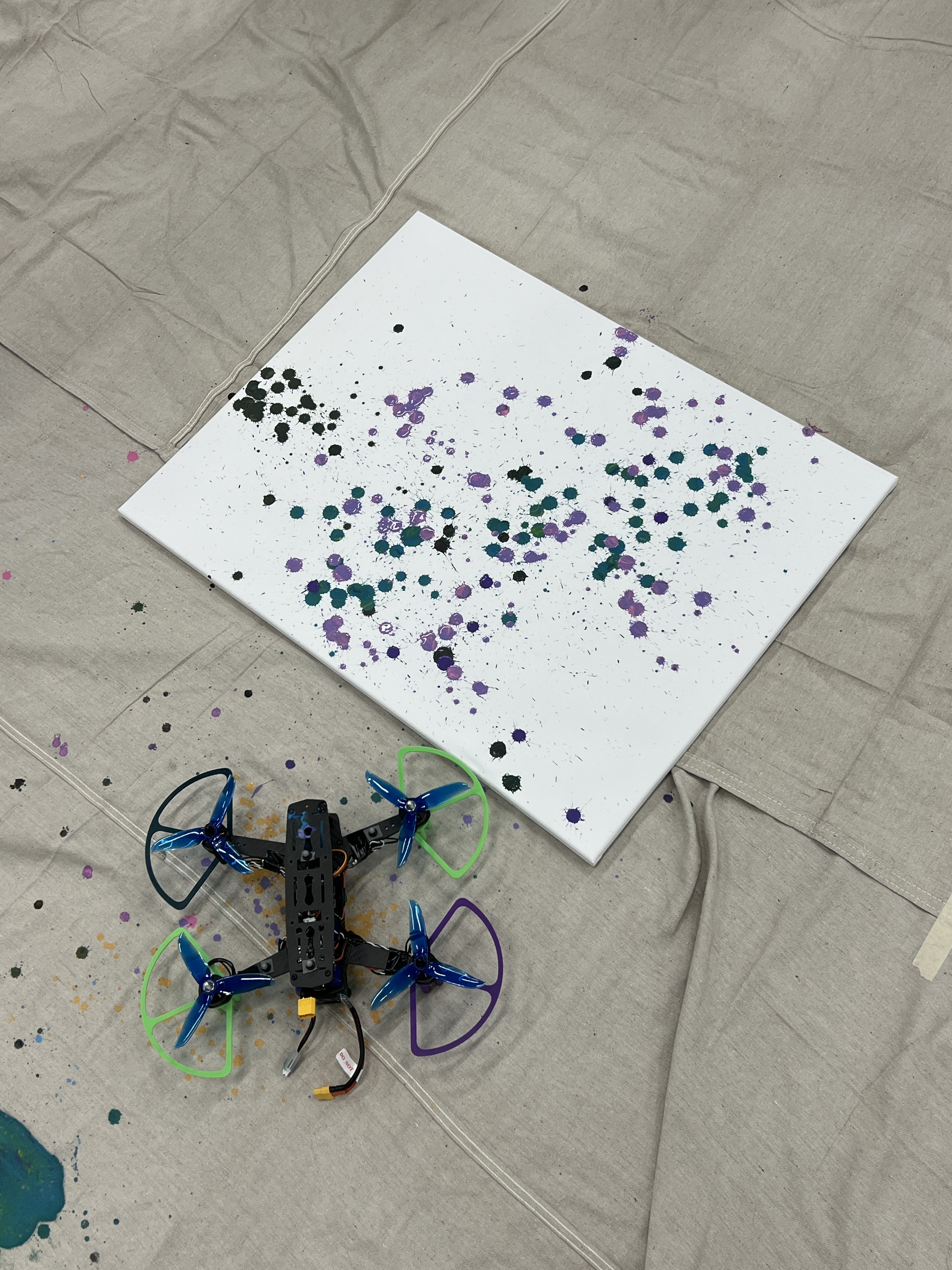
Photo
Click to Enlarge

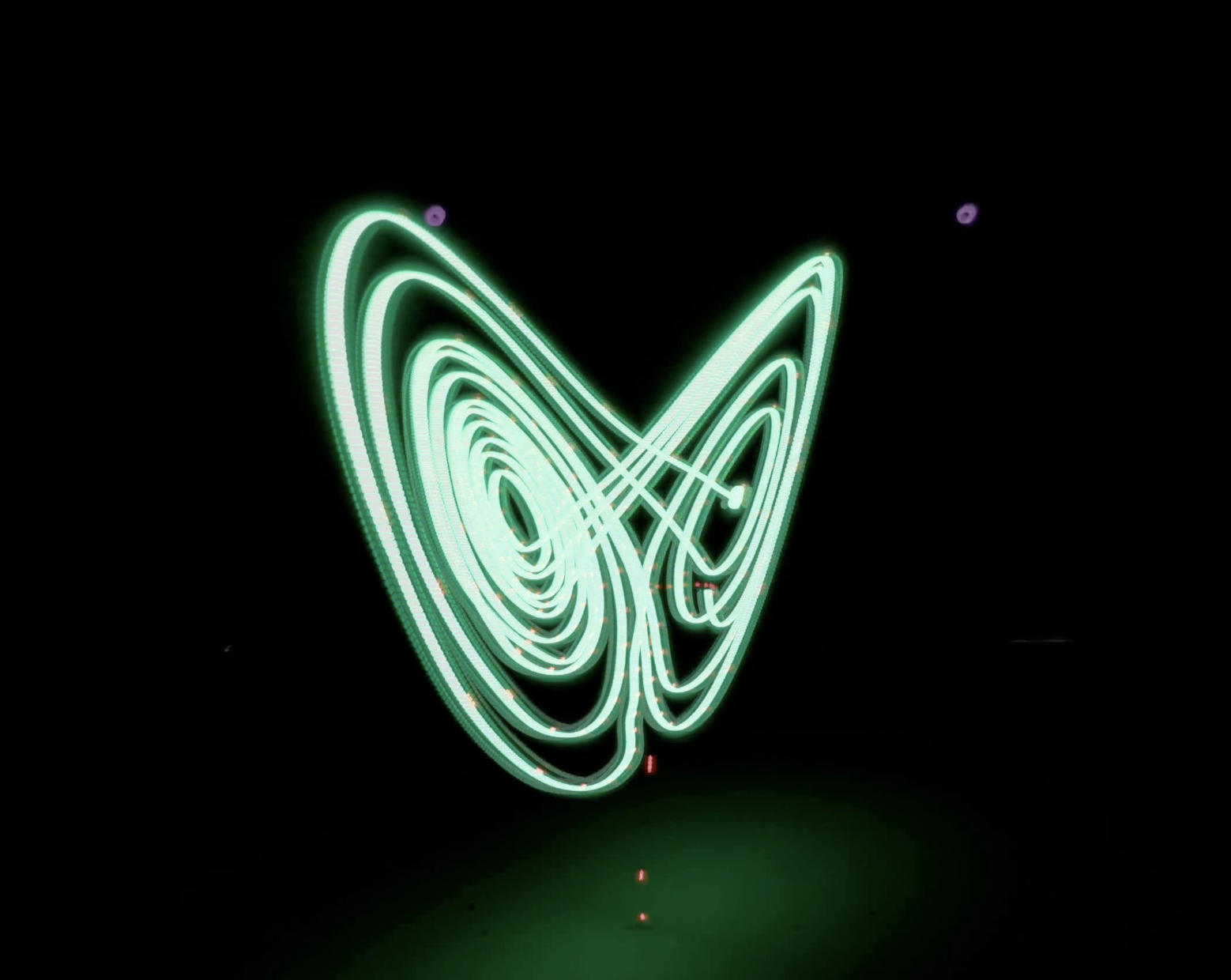
Photo
Click to Enlarge
Photo
Photo